2021 год. Робототехнический комплекс для аддитивной обработки конструкций из алюминиевых и магниевых сплавов
Руководитель проекта: академик Ю.Н. Кульчин
Краткая характеристика основных технических параметров
В разработке восстановление деталей выполняется путем лазерного сплавления послойного наносимого металлического порошкового материала соплом в рабочей зоне по заранее разработанной компьютерной модели изделия.
В качестве источника подачи материала (металлического порошка) в рабочую зону используется питатель оригинальной конструкции, разработанный и изготовленный в ИАПУ ДВО РАН. В технологическом процессе одновременно происходит подача металлического порошка в зону сплавления и воздействие лазерного излучения. Все работы выполняются роботом манипулятором KUKA с интегрированной лазерной головкой и порошковым питателем нашей собственной конструкции по программным кодам, специально разработанным для этой задачи. Вместо робота KUKA может использоваться любой другой робот манипулятор.
Область практического применения
Разработанная система предназначена для использования в машиностроительных производствах для построения гибких быстро перенастраиваемых производственных линий для изготовления серии деталей из алюминиево-магниевых сплавов. Технология может быть использована в медицине для изготовления био-растворимых имплантатов.
Степень готовности разработки к практическому применению
Готовность – 100%. Проведенные исследования показали, что предложенный подход позволяет обеспечить высокую точность изготовления деталей.
Возможный технический и (или) экономический эффект от внедрения
Сокращение времени для выпуска деталей малой серией. Снижение стоимости подготовки производства. Легкая интеграция в состав цифровой экономики. Возможность изготовления единичных изделий.
Сравнительные характеристики с известными разработками
Преимуществом предложенных решений по сравнению с аналогичными подходами является их ориентация на выполнение технологических операций без необходимости создания пресс форм или многочисленной оснастки. Экономия материалов. Отсутствие необходимости создания вакуумных камер.
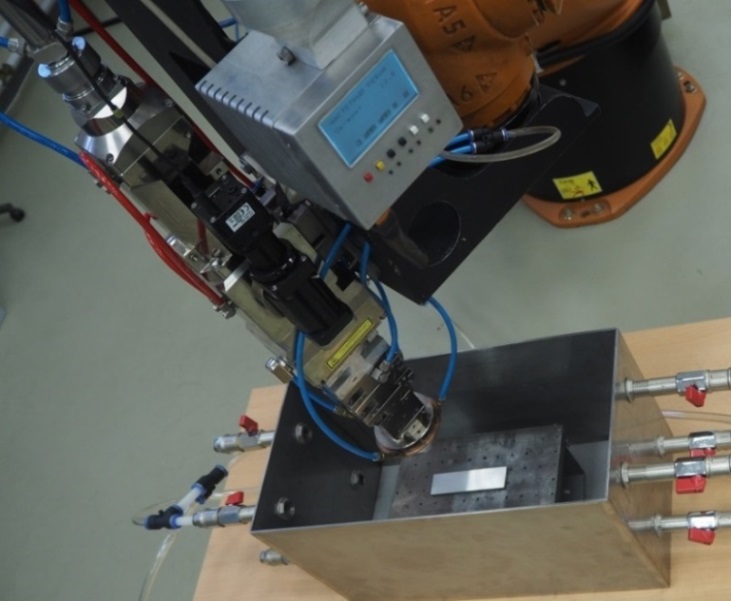
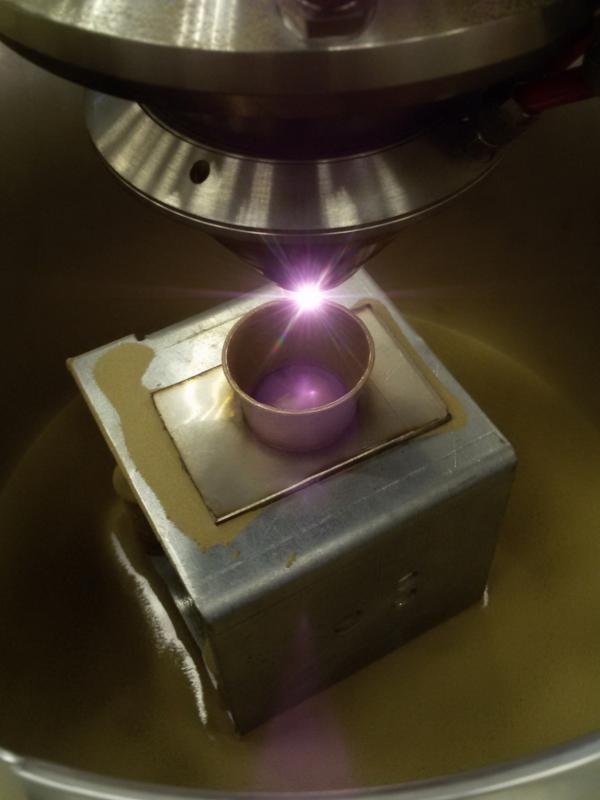
Лазерная головка с порошковым питателем на роботе KUKA готовая к работе (слева), аддитивное выращивание детали (справа)